3주차
Edge detection

이미지의 값에 대한 분포를 그렸을 때, 기울기가 가파른 부분이 edge에 해당한다.
중간 그림에서 기울기가 급감하고, 급증하는 두 부분이 edge에 해당한다.
미분한 결과에서, 극값이 edge에 해당한다.

Sobel filter는 위와 같이 두 필터로 나눌 수 있는데, 이 중 오른쪽에 해당하는 필터는 x방향의 미분에 해당한다.
왼쪽 필터는 blurring의 역할을 담당한다.
x방향 미분 필터는 수직선 검출에 쓰인다.
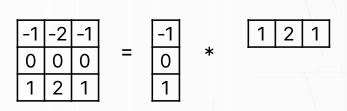
y방향 미분 필터는 수평선 검출에 쓰인다.
Image Gradient
이미지의 강도 또는 색상의 방향 변경
magnitude(크기)

gradient direction(방향)
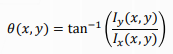
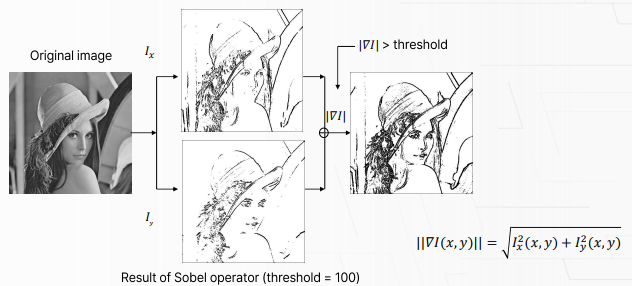
Image Gradient와 threshold를 이용하여 edge를 검출할 수 있다.
노이즈가 많은 이미지의 경우
노이즈가 edge로 판단될 수 있다. => sobel 필터만으로는 잡음을 해결하기 어렵다.
따라서 low pass filter인 average, gaussian 등을 사용해야 한다.

Derivative of Gaussian(DoG)
Gaussian을 1번 미분
peak를 검출

Laplacian of Gaussian(LoG)
Gaussian을 2번 미분
zero crossing point를 검출
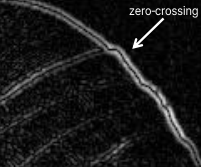
우리가 원하는 edge
굵기가 같은 하나의 선

Canny Edge Detector
4주차
Interest points(Corner points)
일치(Correspondence)
keypoint를 사용
flat보다는 특색 있는 코너의 점을 이용하여 판단
두 이미지 상의 keypoint 추출을 통해 일치하는 점들을 찾고,
두 이미지를 합치는 Image Stitching 등에 응용 가능
Harris Corner Detection
patch를 이용하여 slide window 방식으로 진행
1. flat : 밝기 차이가 없다.
2. edge : 수평, 수직 둘 중 하나만 밝기 차이가 있다.
3. corner : 수평, 수직 두 방향 모두 밝기 차이가 있다.
순서
1. 패치를 이용해 Image Gradient 계산

2. 각각의 Image Gradient에 평균값을 빼서 원점 중심으로 normalize
3. Covariance matrix 계산

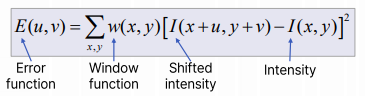
w : Gaussian weight
주변 값과의 차이를 구해본다.
코너는 주변 값과의 차이가 크다. 따라서 E값이 클수록 코너일 확률이 높아진다.

but,

대각선의 경우에 예외 발생
4. Eigenvalues and Eigenvectors 계산

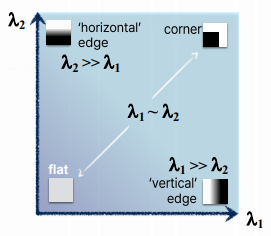
eigenvalue의 해석
둘 다 큰 것이 코너일 확률이 높다.
5. threshold를 사용하여 코너 탐지

방법 1. 둘 중 작은 것이 threshold보다 크다면 corner로 판별


방법 2. |R|이 threshold보다 크고, R이 0보다 크면 코너
eigenvalue를 구하지 않아도 된다는 장점
det M = ad -bc
trace M = a + d
순서정리
1. Sobel이나 DoG를 이미지 전체에 적용하여 Ix, Iy를 구한다.
2. Ix^2, IxIy, Iy^2을 구한다.
3. gaussian filter를 적용한다. (범위 내의 가중합)
g(Ix^2), g(IxIy), g(Iy^2)
4. cornerness function을 이용하여 R값을 구한다.
5. Non-maxima suppression을 이용하여 local maxima를 찾는다.
'공부' 카테고리의 다른 글
| [컴퓨터비전] 7주차 정리 (0) | 2022.12.13 |
|---|---|
| [컴퓨터비전] 5, 6주차 정리 (0) | 2022.12.13 |
| [컴퓨터비전] 1, 2주차 정리 (0) | 2022.12.13 |
| [차량 통신 및 네트워크] 13, 14주차 (0) | 2022.12.11 |
| [차량 통신 및 네트워크] 11, 12주차 (3) | 2022.12.11 |